



Kebşirleýiş armatura gysgyçlary Awtomatiki kebşirleme liniýasy CNC kebşirleýiş roboty
Wideo
Robot simulýasiýasy (DELMIA)
Robot simulýasiýasy, fiziki älemde nämeleriň boljakdygyny görkezmek üçin wirtual älemde hakyky we takyk özüni alyp barşyny we jogaplaryny döredýär, bu bize esasy enjamlary ýa-da önümçilik pollaryny baglamagyň wagty we çykdajylary bolmazdan önümçilik proseslerini dizaýn etmäge we optimizirlemäge mümkinçilik berýär.
ABŞ hakda

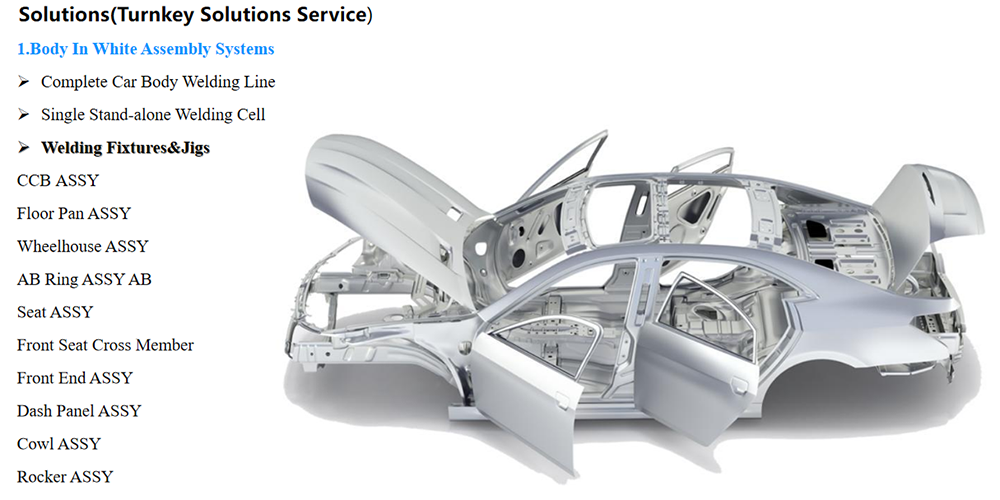

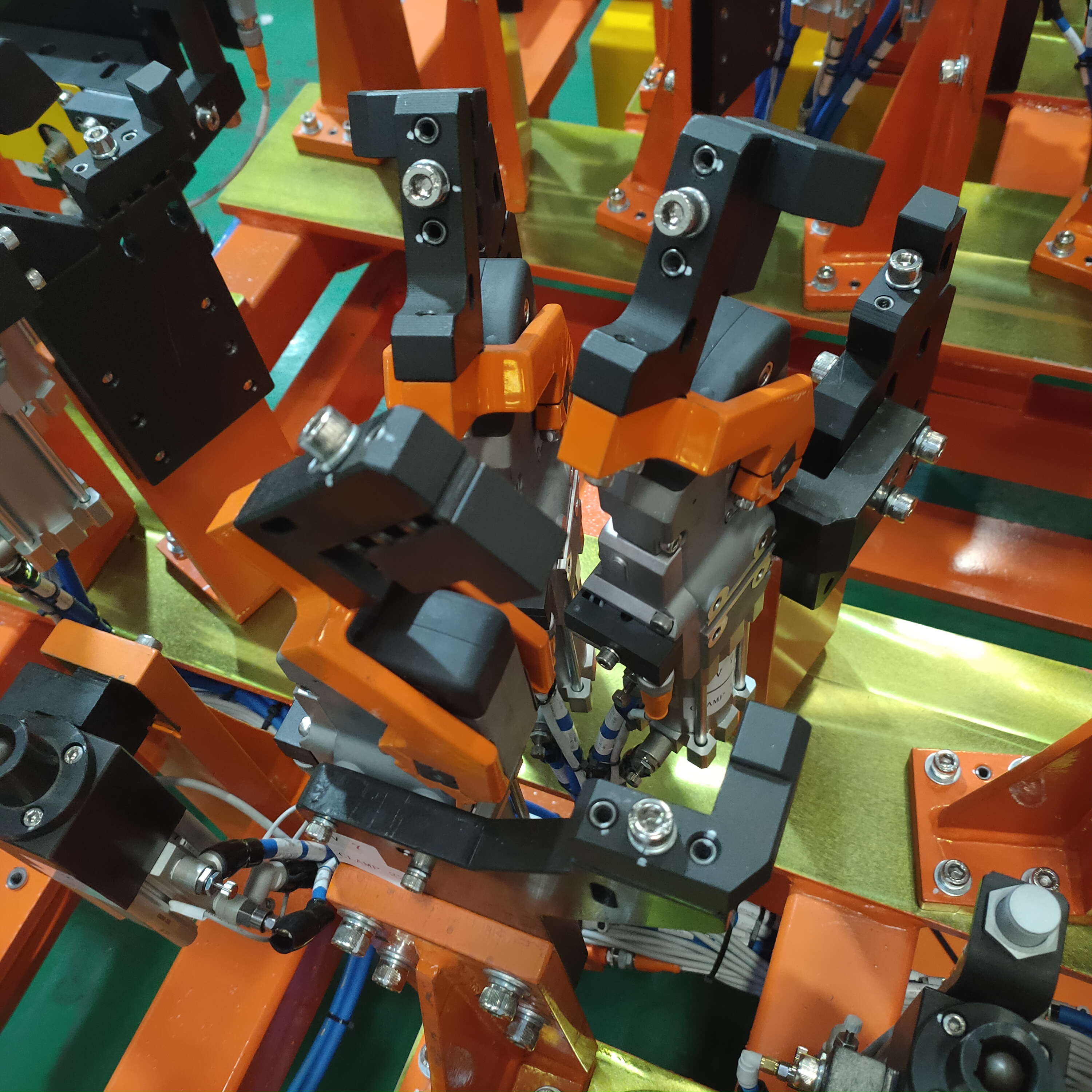
Önüm suratlary



Giriş
TTM tarapyndan öndürilen awtoulag kebşirleýiş enjamy, kebşirleýiş wagtynda titremä we basyşa garşy durmak üçin ýeterlik güýç we berkligi üpjün etmek üçin ýokary güýçli polat we alýumin materiallary bilen öndürilýär.Gurluşyň üstü takyk işlenip, iş böleginiň zaýalanmazlygy ýa-da poslamazlygy üçin örtülendir.
TTM-iň awtoulag kebşirleýiş enjamlary, kebşirleýiş döwründe iş böleginiň berk berkidilmegini üpjün etmek üçin iş böleginiň ululygyny we görnüşini doly göz öňünde tutup döredildi.Gurluşyň ähli bölekleri, gurnamany we sazlamagy gaty aňsat üpjün etmek üçin takyk işlenýär.
Mundan başga-da, TTM-iň awtoulag kebşirleýiş enjamlary, kebşirleýiş wagtynda guralyň durnuklylygyny we ygtybarlylygyny üpjün etmek üçin ygtybarly elektrik we gidrawlik ulgamlaryna eýe.Jigiň uzak bölegi uzak möhletleýin ulanylanda ýokary hilli we ýokary netijeliligi yzygiderli saklap biljekdigi üçin berk synag edildi we barlandy.







.png)
.png)